Trabajo práctico
Tema: brazo robótico manejado con joystick.
Objetivo: Implementar y reconocer los elementos de un sistema de control, los servomotores y el funcionamiento de un Joystick.
Elementos a utilizar:
- Arduino Uno.
- Cables.
- 2 servomotores.
- 1 Joystick.
- 1 sensor CNY70.
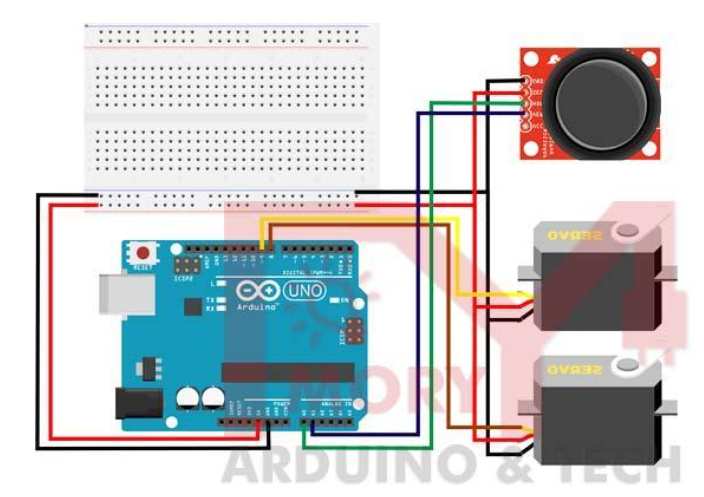
Descripción del sistema: Se pretende armar un brazo robótico de manera tal de desplazar un objeto de un lugar a otro.
Consigna 1: El microcontrolador Arduino UNO deberá ser capaz de las órdenes al joystick para que pueda mover los brazos desde lugar a otro.
Consigna 2: Al mover el objeto al lugar deseado deberá ver un sensor que detecte el objeto y que haga sonar un buzzer indicando que el mismo está en el lugar correcto.
Consigna 3: Contar tres objetos y que encienda y prenda un led indicando que la tarea a finalizado.
Actividades a desarrollar:
- Se deberá realizar el brazo en el aula.
- Representar el esquema eléctrico del sistema.
- Realizar el diagrama en bloques del sistema.
- Realizar las conexiones eléctricas en el aula.
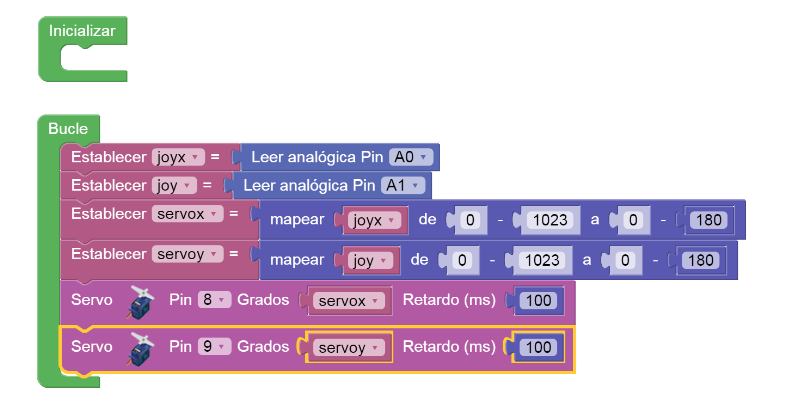
- Realizar la programación y cargarla en el microcontrolador.
Programa
Simular el funcionamiento de una grúa
No hay comentarios.:
Publicar un comentario