Actuadores eléctricos: Servomotores
La palabra “servo” se refiere a que se tiene un lazo cerrado de control, es decir, se envía una señal al motor, este ejecuta la operación y devuelve un valor que es leído para corregir la nueva señal de entrada. Por lo tanto, se tiene un control de la señal enviada. Para lograr esto el servomotor consta de cuatro componentes principales, un motor principal (el cual puede ser DC o AC para casos industriales), una caja reductora para aumentar el torque de salida, un sistema que tenga en cuenta la posición del motor y un controlador interno. También pueden presentar sistemas de frenos en los casos industriales.
Entonces, debe entenderse por Servomotor a todo aquel motor (sin importar su forma constructiva, ni corriente que utilice, ni cómo se manipule el mismo) que presenta un lazo cerrado de control, esto quiere decir que tiene un sistema de medición de posición del eje, que envía la información al sistema de control inicial, indicando así en todo momento la posición del mismo para su corrección.
Los servos de uso de baja potencia son equipos que dispone en su interior de un pequeño motor de corriente continua con un reductor de velocidad y multiplicador de torque y que también dispone de un circuito de control que permite controlar la posición.
Está diseñado para moverse determinada cantidad de grados y luego mantenerse fijo en una posición.
El recorrido del eje de salida es de 180º en la mayoría de ellos, pero puede ser fácilmente modificado para tener un recorrido libre de 360º y actuar así como un motor de continua controlando la velocidad de rotación.
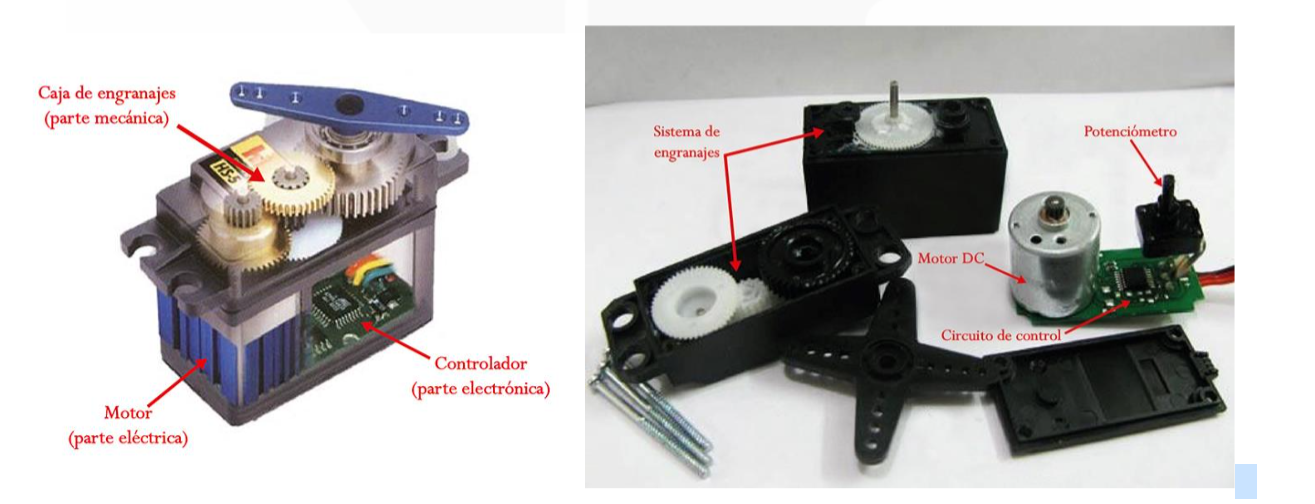
Figura : Descripción y vistas internas de un servomotor para uso en electrónica
Funcionamiento
El principio básico del servo surge de la necesidad de tener un control sobre la rotación de un motor, ya sea en su velocidad de rotación, como también su posición, aceleración y desaceleración del mismo. Si al motor se le acopla un dispositivo auxiliar, el cual permite registrar cuánto rota el eje del motor se puede determinar mediante un ciclo de control de lazo cerrado la posición actual, velocidad de rotación y determinar una posición final en la que se quiere que frene el mismo.
Para controlar un servo tendremos que aplicar un pulso de duración y frecuencia específicos.
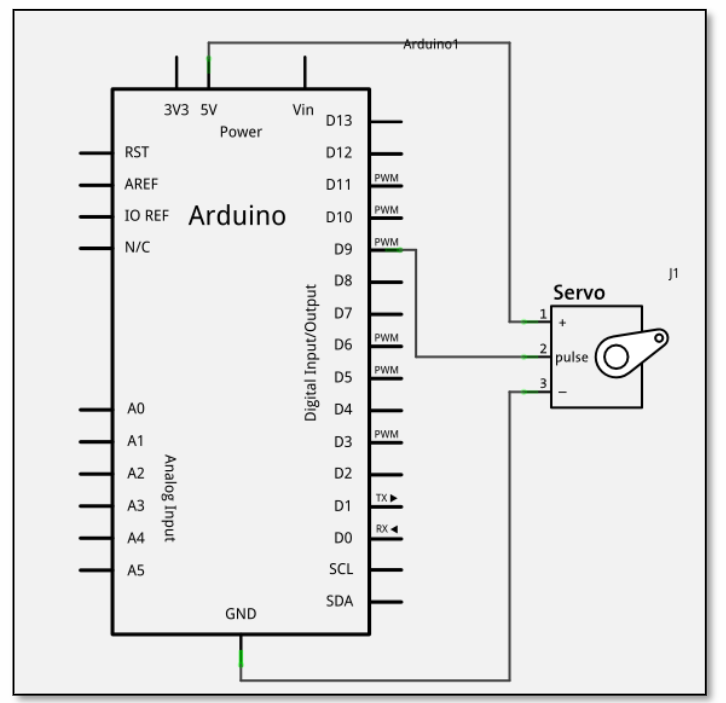
Todos los servos disponen de tres cables; dos para alimentación (Vcc 5V y Gnd) y un tercer cable de control de posición (PWM), para aplicar el tren de pulsos de control que harán que el circuito de control diferencial interno ponga el servo en la posición indicada por la anchura del pulso.
Este control de la posición mediante un potenciómetro tiene cierta desventaja y es que el elemento físico no permite la rotación de más de 180° (existen potenciómetros multivuelta, pero son más específicos), por lo tanto, eso afecta directamente al rango máximo de rotación del servo. Para obtener controles de rangos mayores se deben optar por otros tipos de sistemas de medición (resolvers o encoders ópticos
o magnéticos) u optar por otro tipo de dispositivo
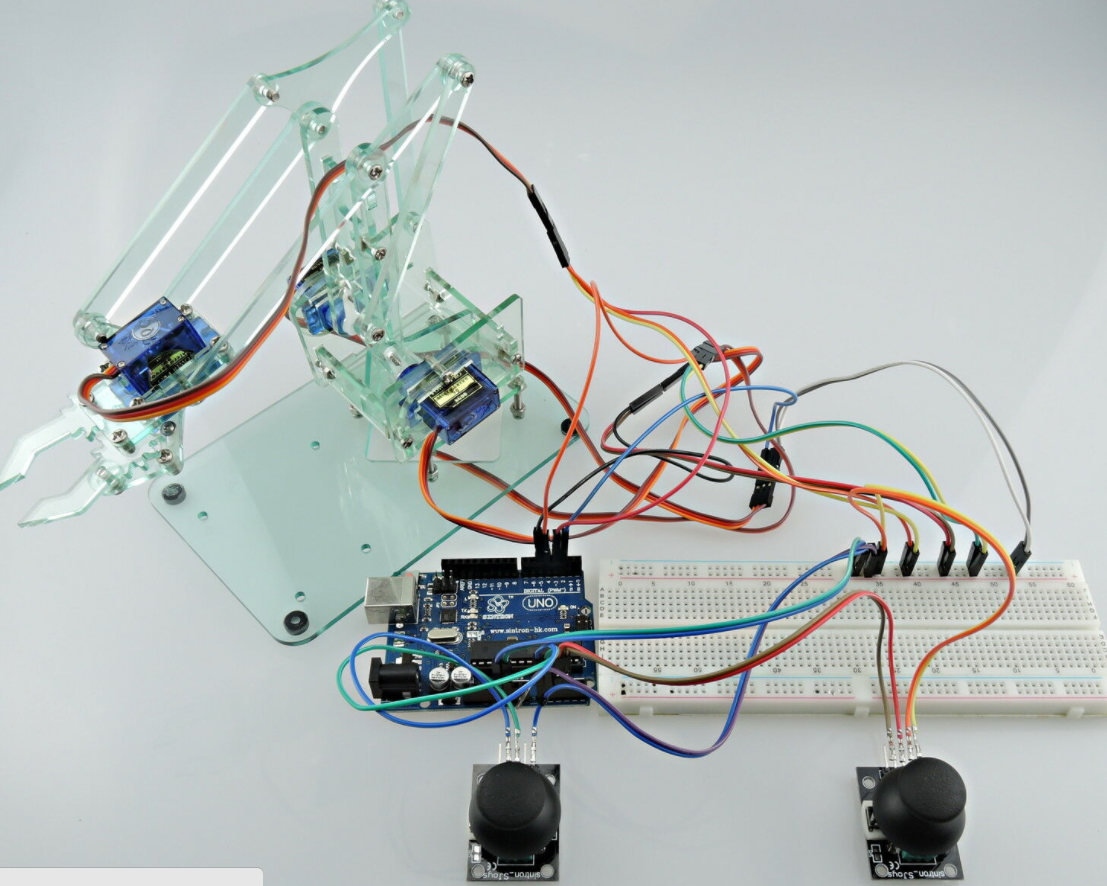
ESQUEMA DE CONEXIÓN

PROGRAMANDO CON SCRATCH DE ARDUINO.

PROGRAMA CON ARDUINO BLOCKS.
Actuadores eléctricos: Servomotores
La palabra “servo” se refiere a que se tiene un lazo cerrado de control, es decir, se envía una señal al motor, este ejecuta la operación y devuelve un valor que es leído para corregir la nueva señal de entrada. Por lo tanto, se tiene un control de la señal enviada. Para lograr esto el servomotor consta de cuatro componentes principales, un motor principal (el cual puede ser DC o AC para casos industriales), una caja reductora para aumentar el torque de salida, un sistema que tenga en cuenta la posición del motor y un controlador interno. También pueden presentar sistemas de frenos en los casos industriales.
Entonces, debe entenderse por Servomotor a todo aquel motor (sin importar su forma constructiva, ni corriente que utilice, ni cómo se manipule el mismo) que presenta un lazo cerrado de control, esto quiere decir que tiene un sistema de medición de posición del eje, que envía la información al sistema de control inicial, indicando así en todo momento la posición del mismo para su corrección.
Los servos de uso de baja potencia son equipos que dispone en su interior de un pequeño motor de corriente continua con un reductor de velocidad y multiplicador de torque y que también dispone de un circuito de control que permite controlar la posición.
Está diseñado para moverse determinada cantidad de grados y luego mantenerse fijo en una posición.
El recorrido del eje de salida es de 180º en la mayoría de ellos, pero puede ser fácilmente modificado para tener un recorrido libre de 360º y actuar así como un motor de continua controlando la velocidad de rotación.
Figura : Descripción y vistas internas de un servomotor para uso en electrónica
Funcionamiento
El principio básico del servo surge de la necesidad de tener un control sobre la rotación de un motor, ya sea en su velocidad de rotación, como también su posición, aceleración y desaceleración del mismo. Si al motor se le acopla un dispositivo auxiliar, el cual permite registrar cuánto rota el eje del motor se puede determinar mediante un ciclo de control de lazo cerrado la posición actual, velocidad de rotación y determinar una posición final en la que se quiere que frene el mismo.
Para controlar un servo tendremos que aplicar un pulso de duración y frecuencia específicos.
Todos los servos disponen de tres cables; dos para alimentación (Vcc 5V y Gnd) y un tercer cable de control de posición (PWM), para aplicar el tren de pulsos de control que harán que el circuito de control diferencial interno ponga el servo en la posición indicada por la anchura del pulso.
Este control de la posición mediante un potenciómetro tiene cierta desventaja y es que el elemento físico no permite la rotación de más de 180° (existen potenciómetros multivuelta, pero son más específicos), por lo tanto, eso afecta directamente al rango máximo de rotación del servo. Para obtener controles de rangos mayores se deben optar por otros tipos de sistemas de medición (resolvers o encoders ópticos
o magnéticos) u optar por otro tipo de dispositivo
ESQUEMA DE CONEXIÓN

No hay comentarios.:
Publicar un comentario