MOTOR PASO A PASO
Mientras que los motores CC normales, están diseñados para que al alimentarlos giren de forma continua, un motor paso a paso está diseñado para girar un pasito cada vez que alimentas una de las fases
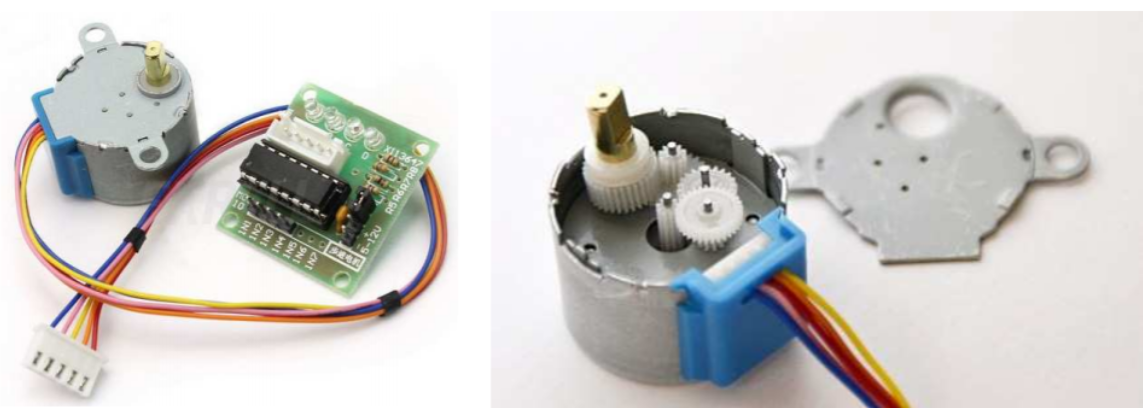
EN LOS KITS DE ARDUINO ENCONTRAMOS EL MOTOR 28BYJ-48 Y DRIVER ULN2003A
Aquí les dejo un ejemplo como se utilizan la mayoría de los componentes que fuimos viendo para hacer un auto robot
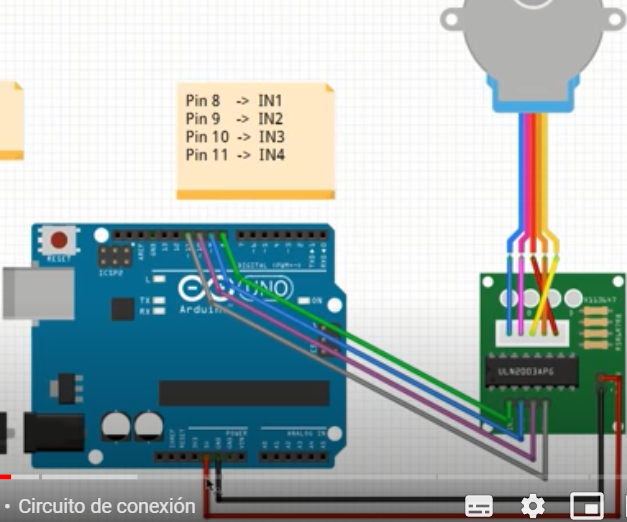
CIRCUITO DE CONEXIÓN
| ARDUINO PIN | 8 | 9 | 10 | 11 |
| DRIVER | IN1 | IN2 | IN3 | IN4 |
Controlador (Driver)

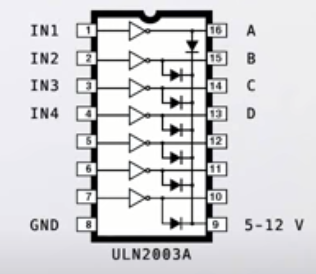

PRINCIPIO DE FUNCIONAMIENTO |
PROGRAMA IDE ARDUINO
int IN1 = 8; // pin digital 8 de Arduino a IN1 de modulo controlador
int IN2 = 9; // pin digital 9 de Arduino a IN2 de modulo controlador
int IN3 = 10; // pin digital 10 de Arduino a IN3 de modulo controlador
int IN4 = 11; // pin digital 11 de Arduino a IN4 de modulo controlador
int demora = 20; // demora entre pasos, no debe ser menor a 10 ms.
// paso completo simple
int paso [4][4] = // matriz (array bidimensional) con la secuencia de pasos
{
{1, 0, 0, 0},
{0, 1, 0, 0},
{0, 0, 1, 0},
{0, 0, 0, 1}
};
void setup() {
pinMode(IN1, OUTPUT); // todos los pines como salida
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
}
void loop() {
for (int i = 0; i < 512; i++) // 512*4 = 2048 pasos
{
for (int i = 0; i < 4; i++) // bucle recorre la matriz de a una fila por vez
{ // para obtener los valores logicos a aplicar
digitalWrite(IN1, paso[i][0]); // a IN1, IN2, IN3 e IN4
digitalWrite(IN2, paso[i][1]);
digitalWrite(IN3, paso[i][2]);
digitalWrite(IN4, paso[i][3]);
delay(demora);
}
}
digitalWrite(IN1, LOW); // detiene por 5 seg.
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
delay(5000);
}
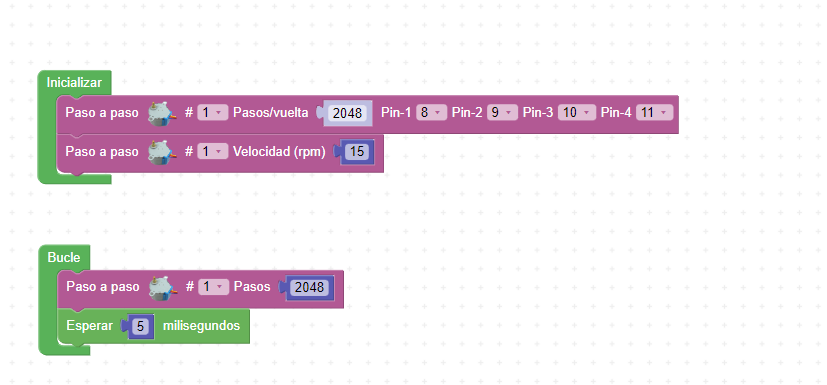
Programa Arduino Blocks
No hay comentarios.:
Publicar un comentario