El abordaje y la resolución de problemas simples y complejos
La Inteligencia Artificial no es una “ciencia mágica” que pueda resolver cualquier problema, sino que es una tecnología disruptiva que nos puede ayudar a resolver determinados tipos de problemas. Esto es: encontrar una solución, que tal vez no sea la mejor, pero que para una persona sería muy complejo abordar.
También tenemos que tener presente que existen diferentes alternativas de solución para un mismo problema. Ello nos permite analizar sobre todas las soluciones cuál es la mejor.
Pensando en la relevancia que tiene el uso de la Inteligencia Artificial en todos los ámbitos, Google lanzó un sitio web, llamado Learn with Google AI (sitio que tiene solamente la versión en inglés), que ofrece diferentes recursos educativos sobre estos temas. Allí podemos encontrar lecciones, tutoriales y ejercicios prácticos para todo tipo de nivel de usuarios.
Otra cuestión a contemplar es que la Inteligencia Artificial trata de simular, a partir de una observación, al ser humano. El ser humano va aprendiendo a partir de su experiencia cotidiana. En general vamos tratando de clasificar situaciones, a través de la organización y sistematización de rasgos comunes y similares.
Machine learning (aprendizaje automático)
¿Cómo se puede lograr que una computadora nos entienda o que nos reconozca? Un sistema de computación es inteligente (por ejemplo, un asistente virtual que responde preguntas, un auto que responde a nuestra voz, etc.) cuando es capaz de reconocer diversos patrones (imágenes, sonidos, etc.). También deberá “aprender” a filtrar la información útil y guardar los nuevos conocimientos. Y por supuesto que también deberá razonar y deducir, pudiendo generar conocimiento.
Podríamos decir que un sistema computacional tiene la capacidad de aprender y de poder cambiar un comportamiento a partir de los nuevos datos e información recibida a través de estímulos externos.
Lo interesante es ver cómo se entrena a un sistema para que mejore y lograr que realice tareas para las que no se planificó y programó originariamente.
El aprendizaje automático imita el comportamiento humano concreto: emula nuestros mecanismos de aprendizaje cotidianos, a partir de un entrenamiento intensivo, donde van extrayendo reglas, además de razonar y hacer determinadas deducciones para seguir añadiendo más conocimiento. Para que una computadora aprenda utiliza diversos lenguajes de programación.
Aplicación Didáctica -Pedagógica de Robótica Educativa
Ejemplo 1
Situación Problemática
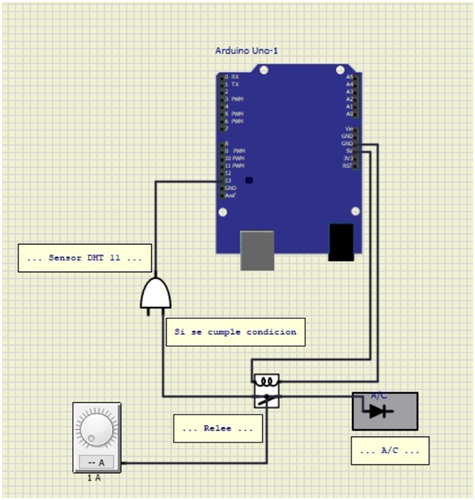
Los Aires Acondicionados instalados en la Escuela no tienen la tecnología de corte o regulación al alcanzar la temperatura estimada. Esto produce un exceso de consumo energético
La propuesta consiste en trabajar con robótica educativa por medio de microcontroladores arduino y lenguaje de programación mblock , scratch y arduino
¿Cuál es objetivo que se pretende que el alumno logre con esta actividad?
Si tuvieras que redefinir la consigna ¿Qué propondrías integrar y agregar a la situación problemática?
¿Qué recursos se utilizan?
¿Se podría mejorar este dispositivo? ¿De qué manera? Realiza un esquema de control (diagrama de bloques) con los dispositivos que se observan.
Ejemplo 2
Blown Away es un reality de Netflix de 10 episodios en el que concursantes compiten por convertirse en el mejor soplador de vidrio.
En el episodio 4, tienen el desafío de relacionar su temática con la robótica. (puedes observar los siguientes videos o ver directamente el capítulo en NETFLIX.
a) Resume en 1 renglón el desafío que deben cumplir los participantes
b) ¿Porqué se considera a la robótica "futuristica"? Fundamentar
c) ¿Cuáles son las disciplinas que pueden integrarse y qué conocimientos se pueden adquirir con esta temática?
Si ves completo el video, ¿qué te parecieron los objetos obtenidos?
Ejemplo 3
Robots en el entorno Objetivo : Identificar los robots que existen en el entorno inmediato. Descripción : Los estudiantes se tomarán un tiempo para observar y recordar la mayor cantidad de robots que se pueden encontrar en el entorno cotidiano (casa,parque, centro comercial calles, trabajo, etc). Procedimiento : En un hoja de papel indicar qué aparato o máquina es considerada un robot. Explicar por qué se cree que la elección es un robot. Realizar un dibujo del robot antes descrito y exponerlo al resto de los compañeros.
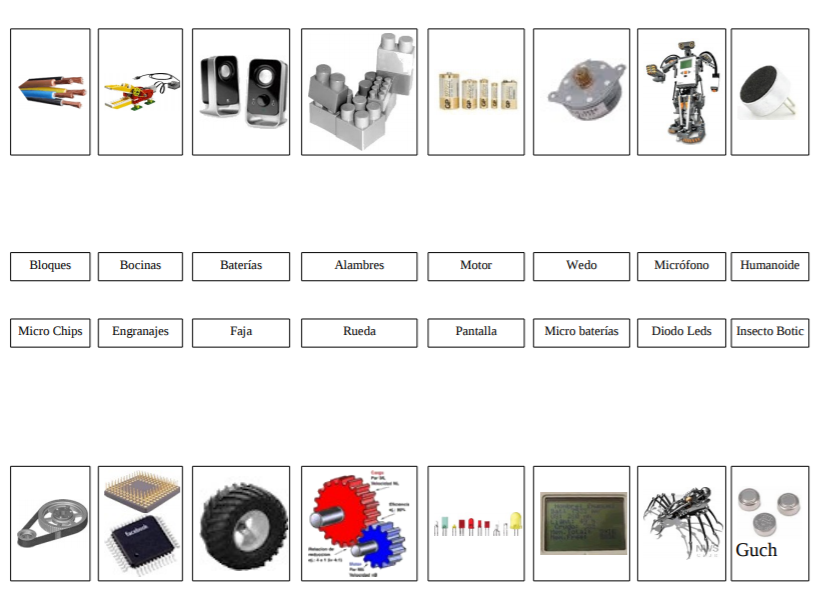
Ejemplo 4
Identificar diferentes piezas que pueden ser utilizadas en la construcción de un robot.
Ejemplo 4
Nombra las ventajas y desventajas de lo que significa utilizar un robot en la vida cotidiana, una fábrica, o en algún proceso.
Ejemplo 5
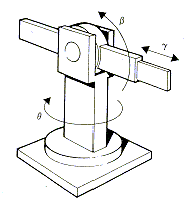
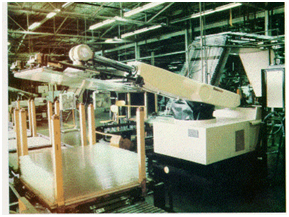
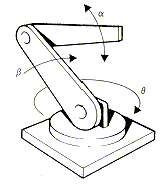
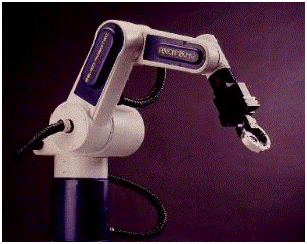
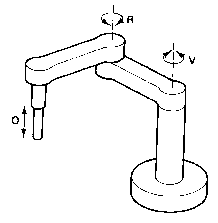
Observa las siguientes imágenes y determina el grado de libertad de cada una
Actualmente con los robots se busca reemplazar los complicados procesos llevados a cabo por los seres humanos en diferentes campos de trabajo, haciendo de esta manera una producción mucho mejor en el área industrial, siento también algo innovador. La robótica industrial se podría considerar una rama de la mecatrónica ya que van tomadas de la mano para generar sistemas inteligentes, flexibles y fiables para que el ser humano pueda trabajar en conjunto con las maquinas en diferentes campos de aplicación.
En la tecnología robótica constantemente se ve un gran avance en diferentes campos, principalmente en el área de la medicina y aplicaciones militares, las cuales presentan muchas soluciones a problemas que para el ser humano es difícil de resolver. Si hacemos una comparación de los robots existentes de hace 5 años con los actuales, veremos un gran cambio y todo esto gracias a que la ciencia y la ingeniería a medida perfeccionan sus desarrollos robóticos.
HUMANOS VS ROBOTS
En el futuro se estima una competencia entre habilidades de los robots y seres humanos en el ámbito laboral, para ello que se tengan que hacer modificaciones al cuerpo humano, en otras palabras, los humanos se tendrán que injertar implantes para tener partes robóticas y así ser más eficiente en el campo que se desee trabajar.
Se estima que entre los años 2030-2050 comenzaremos a ver implantes biónicos, chips de seguridad en los dedos, prótesis de mejor calidad y como ya estamos observando últimamente, existen robots que se adaptan al cuerpo humano para poder cargar cosas increíblemente pesadas sin tener que hacer un esfuerzo físico que podría afectar al ser humano.
¿Deberíamos temer que un robot tome nuestro empleo? La respuesta es simple, claro que no. El avance tecnológico es sorprendentemente rápido y vemos industrias que operan con cientos de robots, aunque la realidad es que el cerebro humano es la tecnología más complicada existente y es por ello que aunque algunos empleos si podrán ser reemplazados por los robots no tendrán la capacidad de tomar puestos que requieran la toma de decisiones, la creatividad, entre otros como por ejemplo el factor más importante gracias al cual podemos innovar y seguir desarrollando nuevas cosas, “LA IMAGINACION”.
CLASIFICACIÓN DE LOS ROBOTS
Hoy en día existen diferentes robots que tienen forma humana, de plantas, animales o incluso algunos con diseños provenientes del creador, los podemos clasificar de 4 formas:
Androides.
Móviles.
Zoomórficos.
Poliarticulados.
TIPOS DE ROBOTS
En la actualidad existe una gran variedad de robots con diferentes características, en este caso se menciona un resumen y se proporciona un enlace de cada uno para poder ver más información de estos tipos de robots.
Robot industrial de manipulación: Se podría considerar como una máquina autónoma la cual puede ser reprogramada para que pueda cumplir su función. Este tipo de robots tiene varias articulaciones o ejes que permite posicionar y orientar materiales en el espacio deseado, el movimiento se puede realizar en tres ejes (x,y,z). En el área de robótica industrial podemos encontrar algunos que se están fijos y otros que son móviles
Robots de servicio: Actualmente se utilizan en el hogar para limpieza cuya función puede ser aspiración, barrenderos, limpiadores de piscinas y otros tipos diferentes de robots para especificaciones especiales en la limpieza del hogar. En esta categoría también se encuentran los robots de vigilancia y telepresencia como servicio a la comunidad.
Robots de investigación: En las universidades son muy utilizados diferentes tipos de robots ya sea brazo articulado, móviles, humanoides, hexápodo, etc. Normalmente son empleados para realizar investigación en el área de inteligencia artificial sin alguna aplicación concreta pero también se dan casos en las cuales se realizan investigaciones especiales para la industria privada con aplicaciones concretas.
Robots militares: Principalmente son acompañantes y guías de escuadrones militares en operaciones especiales. Son de diferentes tipos y características los cuales realizan maniobras como desactivación de bombas, estos pueden ser autónomos o manipulados por medio de control remoto, robots de carga y aviones para inspeccionar áreas, para este tipo de tareas podemos encontrar especialmente los drones. El objetivo principal en este tipo de robots con fines militares es para implementarse en la búsqueda y rescate de personas.
Robots médicos: Los podemos encontrar en las instituciones médicas, aunque ya es posible encontrarlos en nuestros hogares en los casos en que el paciente requiere un trato especial, principalmente se emplean en la cirugía donde se utilizan varios brazos robóticos de alta precisión para asistir al cirujano en las operaciones. También se pueden encontrar las prótesis que tienen un sistema de mando y es adaptado fácilmente al cuerpo, consiste en suplantar aquellos órganos o extremidades para un movimiento y funcionamiento correcto. Se podría considerar dentro de esta categoría algunos vehículos autónomos y máquinas para levantamiento de personas.
Nano robots: La nanotecnología es un avance científico y tecnológico para varías ramas de investigación, en este caso tenemos robots que son insertados en el cuerpo humano para combatir diferentes enfermedades.
Robots educacionales: Son empleados particularmente en escuelas en las cuales utilizan Lego Mindstorms, podemos encontrar diferentes categorías para el aprendizaje del alumno.
Robots espaciales: Son utilizados en el espacio, como pueden ser los vehículos que se emplean en el planeta Marte. Tienen un diseño especial para funcionar en entornos o condiciones de baja gravedad.
Juguetes robóticos: Actualmente podemos encontrar muchos tipos de juguetes con tecnología para perseguir o mostrar alguna acción, como por ejemplo el perro robot que te sigue a dónde vas y puedes interactuar con él, también podemos encontrar robots que realizan acciones que expresan alguna emoción a determinadas acciones realizadas por el ser humano. En esta categoría también se podrían considerar los drones.
TIPO DE ROBOTS ARTICULADOS
Empleados principalmente en la robótica industrial, se proporciona un breve resumen de sus características principales, para más información da clic en el enlace ver más.
Robot Antropomórficos: También conocido como manipulador de codo, consta de dos articulaciones, una para girar sobre un eje vertical y otra para elevar la articulación correspondiente a la elevación del hombro, dependiendo del sistema al que se emplea presenta dos o tres articulaciones de muñeca en el extremo del manipulador. Por lo general tienen 6 o más grados de libertad (DOF) más una muñeca que cuenta normalmente con 3 grados de libertad, el resto de las articulaciones correspondería al posicionamiento de la herramienta en espacio. Este tipo de robot es principalmente utilizado en la industria para tareas pesadas y repetitivas.
Los elementos que forman parte de la totalidad del robot son:
manipulador
controlador
dispositivos de entrada y salida de datos
dispositivos especiales
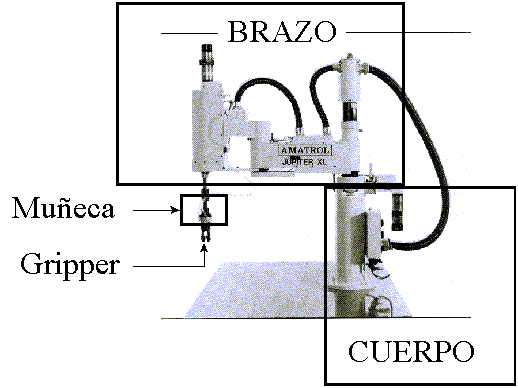
Manipulador
Mecánicamente, es el componente principal. Está formado por una serie de elementos estructurales sólidos o eslabones unidos mediante articulaciones que permiten un movimiento relativo entre cada dos eslabones consecutivos.
Las partes que conforman el manipulador reciben, entre otros, los nombres de: cuerpo, brazo, muñeca y actuador final (o elemento terminal). A este último se le conoce habitualmente como aprehensor, garra, pinza o gripper.
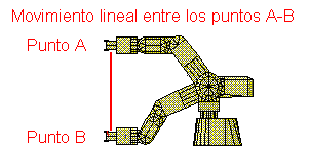
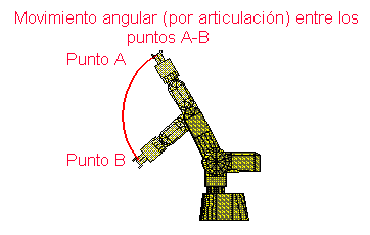
Cada articulación provee al robot de, al menos, un grado de libertad. En otras palabras, las articulaciones permiten al manipulador realizar movimientos:
Lineales que pueden ser horizontales o verticales.
Angulares (por articulación)
(En los dos casos la línea roja representa la trayectoria seguida por el robot).
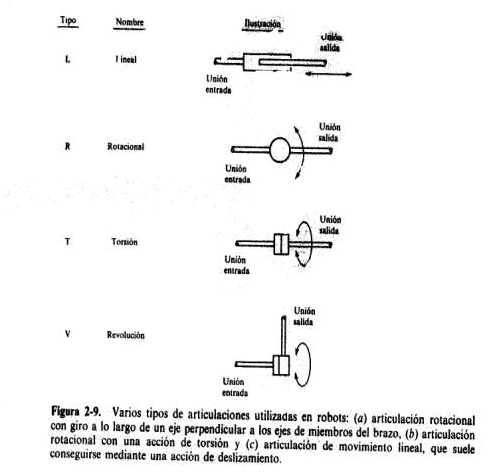
Existen dos tipos de articulación utilizados en las juntas del manipulador:
Prismática /Lineal - junta en la que el eslabón se apoya en un deslizador lineal. Actúa linealmente mediante los tornillos sinfín de los motores, o los cilindros.
Rotacional - junta giratoria a menudo manejada por los motores eléctricos y las transmisiones, o por los cilindros hidráulicos y palancas.
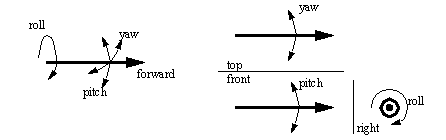
Básicamente, la orientación de un eslabón del manipulador se determina mediante los elementos roll, pitch y yaw
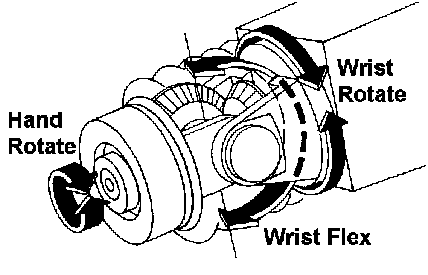
A la muñeca de un manipulador le corresponden los siguientes movimientos o grados de libertad: giro (hand rotate), elevación (wrist flex) y desviación (wrist rotate) como lo muestra el modelo inferior, aunque cabe hacer notar que existen muñecas que no pueden realizar los tres tipos de movimiento.
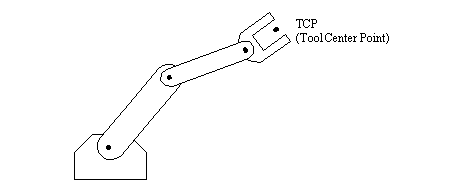
El actuador final (gripper) es un dispositivo que se une a la muñeca del brazo del robot con la finalidad de activarlo para la realización de una tarea específica. La razón por la que existen distintos tipos de elementos terminales es, precisamente, por las funciones que realizan. Los diversos tipos podemos dividirlos en dos grandes categorías: pinzas y herramientas. Se denomina Punto de Centro de Herramienta (TCP, Tool Center Point) al punto focal de la pinza o herramienta. Por ejemplo, el TCP podría estar en la punta de una antorcha de la soldadura.
Controlador
Como su nombre indica, es el que regula cada uno de los movimientos del manipulador, las acciones, cálculos y procesado de la información. El controlador recibe y envía señales a otras máquinas-herramientas (por medio de señales de entrada/salida) y almacena programas.
Existen varios grados de control que son función del tipo de parámetros que se regulan, lo que da lugar a los siguientes tipos de controladores:
de posición: el controlador interviene únicamente en el control de la posición del elemento terminal;
cinemático: en este caso el control se realiza sobre la posición y la velocidad;
dinámico: además de regular la velocidad y la posición, controla las propiedades dinámicas del manipulador y de los elementos asociados a él;
adaptativo: engloba todas las regulaciones anteriores y, además, se ocupa de controlar la variación de las características del manipulador al variar la posición
Otra clasificación de control es la que distingue entre control en bucle abierto y control en bucle cerrado.
El control en bucle abierto da lugar a muchos errores, y aunque es más simple y económico que el control en bucle cerrado, no se admite en aplicaciones industriales en las que la exactitud es una cualidad imprescindible. La inmensa mayoría de los robots que hoy día se utilizan con fines industriales se controlan mediante un proceso en bucle cerrado, es decir, mediante un bucle de realimentación. Este control se lleva a cabo con el uso de un sensor de la posición real del elemento terminal del manipulador. La información recibida desde el sensor se compara con el valor inicial deseado y se actúa en función del error obtenido de forma tal que la posición real del brazo coincida con la que se había establecido inicialmente.
Dispositivos de entrada y salida
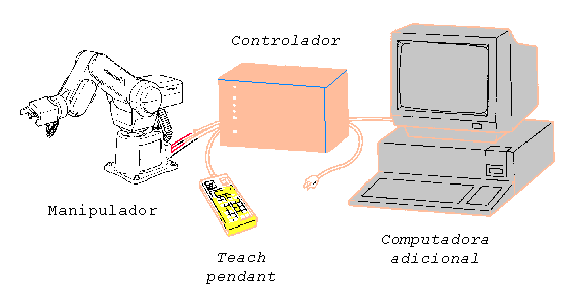
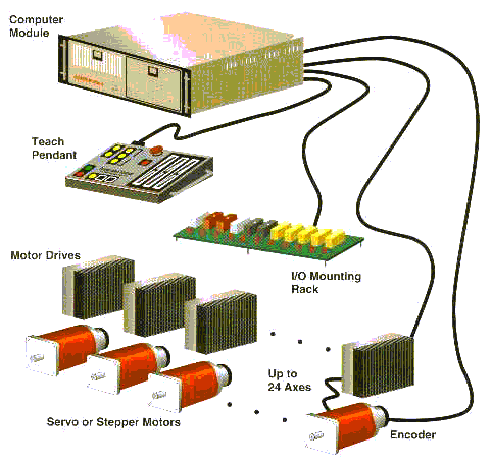
Los más comunes son: teclado, monitor y caja de comandos (teach pendant).
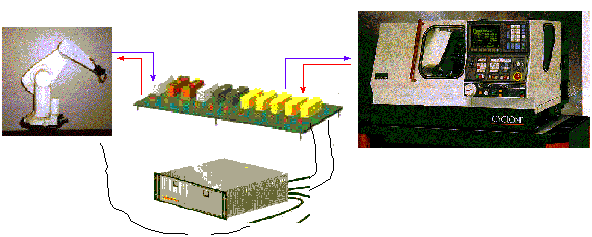
En el dibujo se tiene un controlador (computer module) que envía señales a los motores de cada uno de los ejes del robot y la caja de comandos (teach pendant) la cual sirve para enseñarle las posiciones al manipulador del robot.
"" />
Los dispositivos de entrada y salida permiten introducir y, a su vez, ver los datos del controlador. Para mandar instrucciones al controlador y para dar de alta programas de control, comúnmente se utiliza una computadora adicional. Es necesario aclarar que algunos robots únicamente poseen uno de estos componentes. En estos casos, uno de los componentes de entrada y salida permite la realización de todas las funciones.
Las señales de entrada y salida se obtienen mediante tarjetas electrónicas instaladas en el controlador del robot las cuales le permiten tener comunicación con otras máquinas-herramientas
Se pueden utilizan estas tarjetas para comunicar al robot, por ejemplo, con las máquinas de control numérico (torno, ...). Estas tarjetas se componen de relevadores, los cuales mandan señales eléctricas que después son interpretadas en un programa de control. Estas señales nos permiten controlar cuándo debe entrar el robot a cargar una pieza a la máquina, cuando deben empezar a funcionar la máquina o el robot, etc.
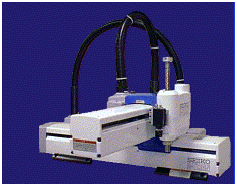
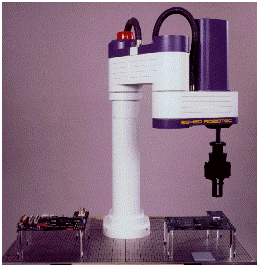
Robot Scara: Este robot tiene la ventaja de poder operar a gran velocidad en comparación con otros robots que tienen una mayor flexibilidad. Es empleado para ensamblaje, para aplicaciones que requieren movimientos rápidos, repetitivos y movimientos articulados de un punto a otro.
Tipos de configuraciones morfológicas
La estructura del manipulador y la relación entre sus elementos proporcionan una configuración mecánica, que da origen al establecimiento de los parámetros que hay que conocer para definir la posición y orientación del elemento terminal. Fundamentalmente, existen cuatro estructuras clásicas en los manipuladores, que se relacionan con los correspondientes modelos de coordenadas en el espacio y que se citan a continuación: cartesianas, cilíndricas, esféricas, angulares. Así, el brazo del manipulador puede presentar cuatro configuraciones clásicas:
cartesiana
cilíndrica
esférica
de brazo articulado,
y una no clásica:
SCARA (Selective Compliance Assembly Robot Arm).
El empleo de diferentes combinaciones de articulaciones en un robot, da lugar a diferentes configuraciones, con características a tener en cuenta tanto en el diseño y construcción del robot como en su aplicación. Las combinaciones más frecuentes son con tres articulaciones, que son las más importantes a la hora de posicionar su extremo en un punto en el espacio. A continuación se presentan las características principales de las configuraciones del brazo manipulador.
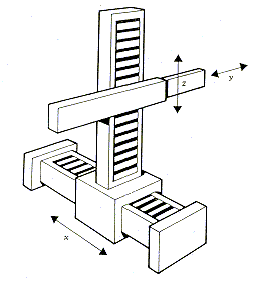
Cartesiana / Rectilínea -El posicionando se hace en el espacio de trabajo con las articulaciones prismáticas. Esta configuración se usa bien cuando un espacio de trabajo es grande y debe cubrirse, o cuando la exactitud consiste en la espera del robot. Posee tres movimientos lineales, es decir, tiene tres grados de libertad, los cuales corresponden a los movimientos localizados en los ejes X, Y y Z.
Los movimientos que realiza este robot entre un punto y otro son con base en interpolaciones lineales. Interpolación, en este caso, significa el tipo de trayectoria que realiza el manipulador cuando se desplaza entre un punto y otro. A la trayectoria realizada en línea recta se le conoce como interpolación lineal y a la trayectoria hecha de acuerdo con el tipo de movimientos que tienen sus articulaciones se le llama interpolación por articulación.
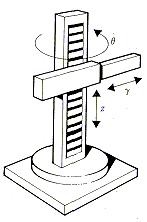
Cilíndrica - El robot tiene un movimiento de rotación sobre una base, una articulación prismática para la altura, y una prismática para el radio. Este robot ajusta bien a los espacios de trabajo redondos. Puede realizar dos movimientos lineales y uno rotacional, o sea, que presenta tres grados de libertad.
Este robot está diseñado para ejecutar los movimientos conocidos como interpolación lineal e interpolación por articulación. La interpolación por articulación se lleva a cabo por medio de la primera articulación, ya que ésta puede realizar un movimiento rotacional.
Esférica / Polar - Dos juntas de rotación y una prismática permiten al robot apuntar en muchas direcciones, y extender la mano a un poco de distancia radial. Los movimientos son: rotacional, angular y lineal. Este robot utiliza la interpolación por articulación para moverse en sus dos primeras articulaciones y la interpolación lineal para la extensión y retracción.
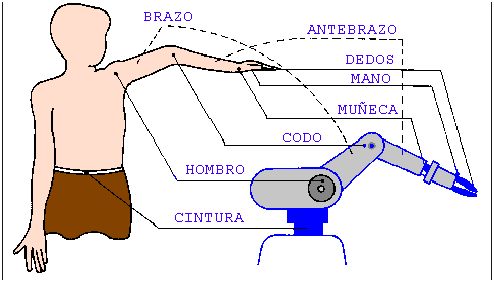
de Brazo articulado / Articulación esférica / Articulación coordinada / Rotación / Angular - El robot usa 3 juntas de rotación para posicionarse. Generalmente, el volumen de trabajo es esférico. Estos tipos de robot se parecen al brazo humano, con una cintura, el hombro, el codo, la muñeca. Presenta una articulación con movimiento rotacional y dos angulares. Aunque el brazo articulado puede realizar el movimiento llamado interpolación lineal (para lo cual requiere mover simultáneamente dos o tres de sus articulaciones), el movimiento natural es el de interpolación por articulación, tanto rotacional como angular.
SCARA - Similar al de configuración cilíndrica, pero el radio y la rotación se obtiene por uno o dos eslabones. Este brazo puede realizar movimientos horizontales de mayor alcance debido a sus dos articulaciones rotacionales. El robot de configuración SCARA también puede hacer un movimiento lineal (mediante su tercera articulación).
Robot Delta: Es muy utilizado en impresiones 3D ya que presenta tres grados de libertad y cuenta con una gran velocidad, también es empleado en el área industrial para acomodar objetos o extraer con la limitación de peso del objeto (esto varía dependiendo de cada diseño, se debe verificar en la hoja de datos del proveedor).
TIPOS DE ROBOTS MÓVILES
Robots con ruedas: Empleados para el transporte de materiales, mercancía y personas. Dependiendo de la construcción del robot se puede utilizar para diferentes propósitos, las ruedas implementadas permiten una gran movilidad con una alta eficiencia en relación de la distancia recorrida y el suministro de energía empleado. La desventaja para los robots con ruedas son las superficies irregulares.
Robots orugas o con cadena: El robot oruga es normalmente utilizado para explorar áreas de difícil acceso, su peculiar estructura le permite moverse por terrenos irregulares. Para un movimiento en línea recta es muy eficiente, pero presenta una desventaja al realizar giros ya que su eficiencia es muy baja.
Robot con patas o zoomórficos: Son diseñados en base a los animales terrestres. Aunque su movilidad es de muy baja eficiencia son capaces de adaptarse a la perfección en terrenos irregulares.
Robots aéreos: Estos son autónomos, vuelan de forma no tripulada o por control remoto. Normalmente es utilizado en aplicaciones militares.
Robots marinos o submarinos
Robots humanoides o androides
Robots manipuladores móviles
Robots Transformers: Son robots que pueden cambiar su apariencia en otro tipo de forma, más que nada podemos identificarlos con la película de Transformers al convertirse en un automóvil. En la actualidad ya podemos observar robots que se transforman de coche a barco o de coche a helicóptero.
TIPOS DE ROBOTS EN COMPETENCIA
Actualmente existen diferentes eventos que se están volviendo muy populares en varios países, las competencias de robots en diversas categorías. Una de las competencias más populares son las guerras de robots (war robots) para robots de tamaño grande, y para robots de menor tamaño se pueden encontrar categorías como robots velocistas y robots sumo. Mostraremos un breve resumen de lo que se realiza en cada competencia de acuerdo al tipo de robot y para más información puedes dar clic en ver más.
Robot velocista: Es una competencia en la que los robots deben de seguir la pista marcada con una cinta de color, pasando varías pruebas propuestas como puentes y curvas que el trayecto implica, para que tu robot resulte ganador debe cumplir el trayecto en el menor tiempo posible.
Robot sigue línea: A diferencia del robot velocista, en esta competencia se coloca una pista más compleja, conforme el robot avanza a determinadas marcas de la pista se le otorgan puntos, también se considera el tiempo si el robot completa la ruta.
Robot laberinto: La prueba consiste en recorrer un laberinto para encontrar la salida u objeto dependiendo del reglamento marcado. El laberinto normalmente tiene paredes delimitadoras, pero se dan casos en que las secciones son dibujadas con una línea.
Cowbots: En esta competencia se enfrentan dos robots que en una arena de combate.
Robot sumo: En este estilo existen diferentes categorías, principalmente se lleva a cabo por dos robots que se enfrentan dentro de una zona delimitada, el propósito es sacar al rival de esta zona.
Robot carrera de bípedos: Consiste en robots cuyo movimiento utiliza dos extremidades inferiores, estos compiten en una línea recta, siendo el ganador el primer robot que llegue a la meta del recorrido.
Componentes básicos para construir un robot
Construir tu propio robot sin grandes conocimientos de electrónica o mecánica es posible.
Afortunadamente existen multitud de componentes muy fáciles de usar y conectar para todos los que os atrae este fascinante mundo.
1 : Unidad de control
La unidad de control, realiza principalmente 2 acciones:
está “pendiente” de las señales se reciben a través de los sensores del robot (luz, corriente eléctrica, calor, etc.).
“ordena” a los actuadores del robot (motores, luces, etc.) que realicen acciones.
De forma muy resumida y general, un robot funciona así:
Cuando pones en marcha el robot, se empiezan a realizar las instrucciones que están almacenadas en la memoria de la unidad de control.
Si el robot dispone de algún tipo de sensor, la unidad de control comprueba qué datos llegan.
Teniendo en cuenta los datos recibidos y las instrucciones del programa, la unidad de control ejecuta, o no, alguna acción determinada.
Este ciclo se repetirá mientras el robot esté en funcionamiento. Puede ser un ciclo cortísimo, por ejemplo, comprobar una vez por segundo la temperatura de un motor para saber cuándo aumenta peligrosamente y pararlo; o puede ser un ciclo muy largo realizando muchas acciones complejas.
La unidad de control siempre ejecuta el ciclo que tiene programado en su memoria.
Debes tener en cuenta que una acción no tiene por qué repetirse. Puedes programar un robot para que ejecute una acción una sola vez.
Objetivo: Implementar y reconocer los elementos de un sistema de control, los servomotores y el funcionamiento de un Joystick.
Elementos a utilizar:
Arduino Uno.
Cables.
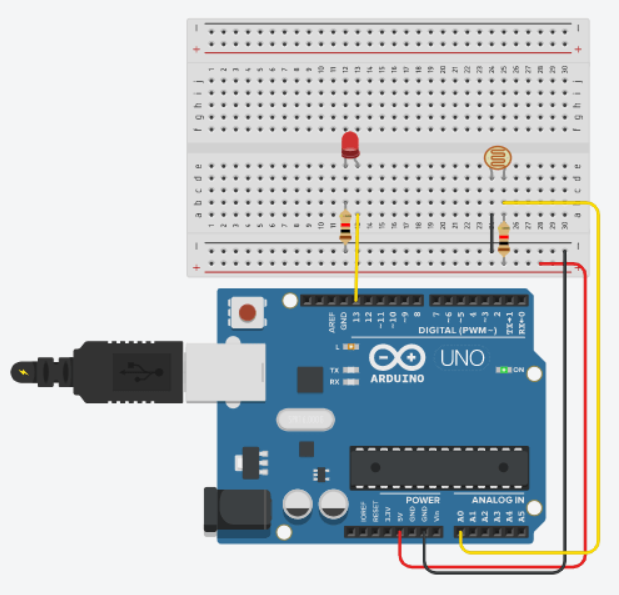
1 LED
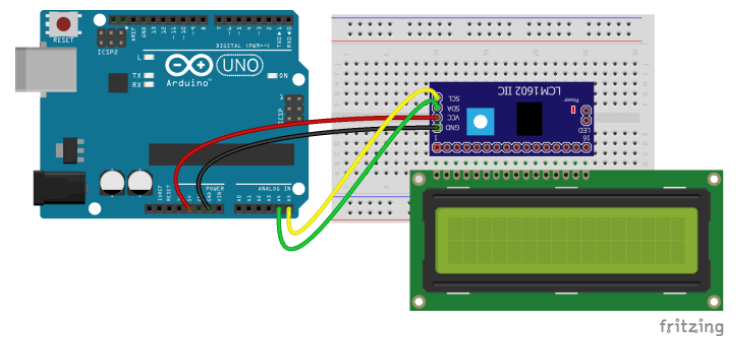
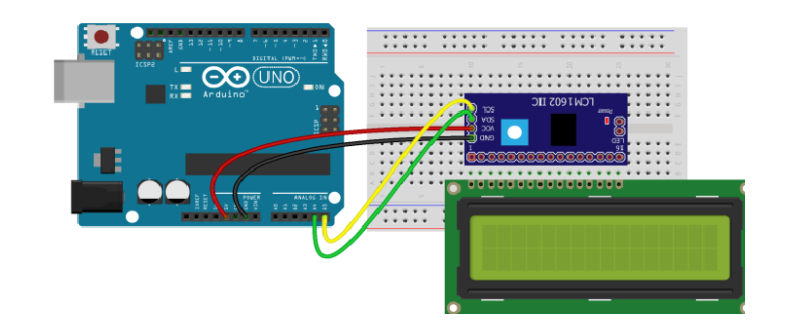
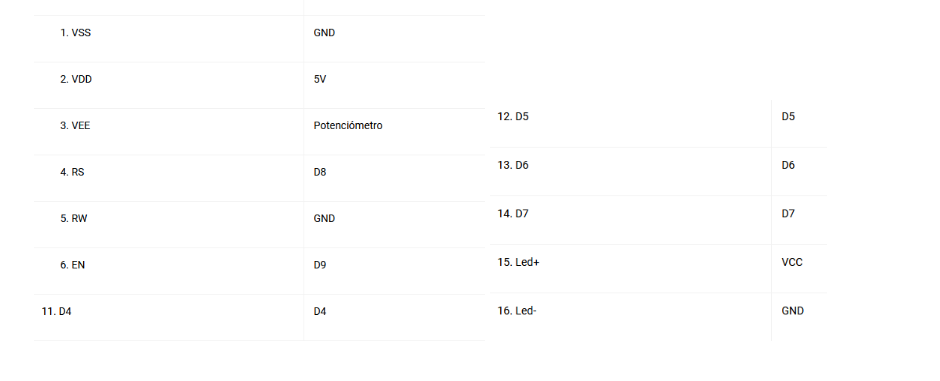
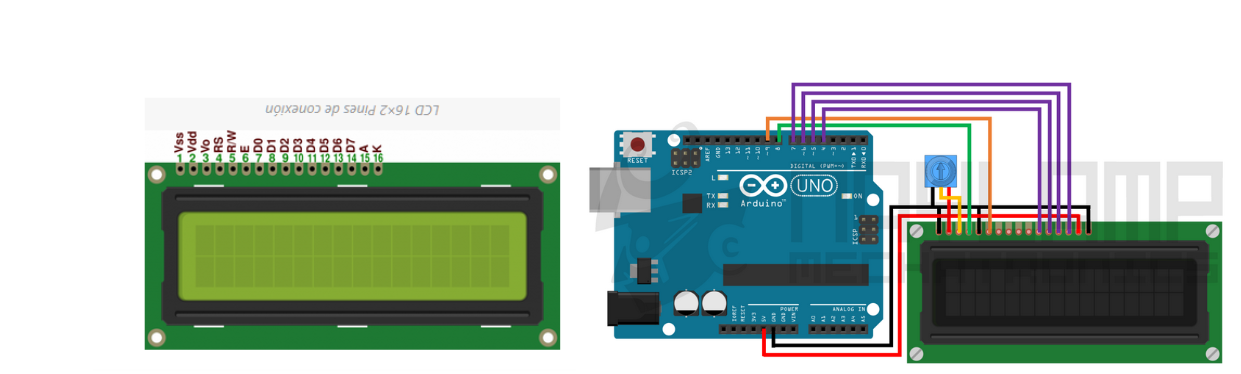
1 Pantalla LCD con controlador I2C.
1 sensor LDR.
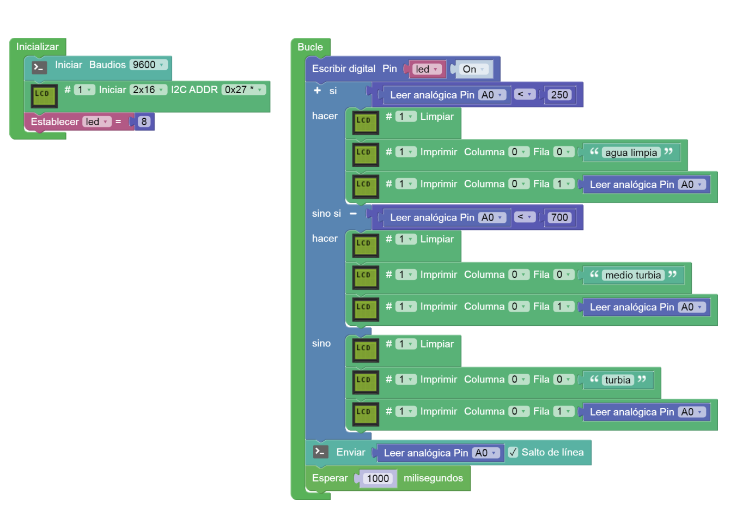
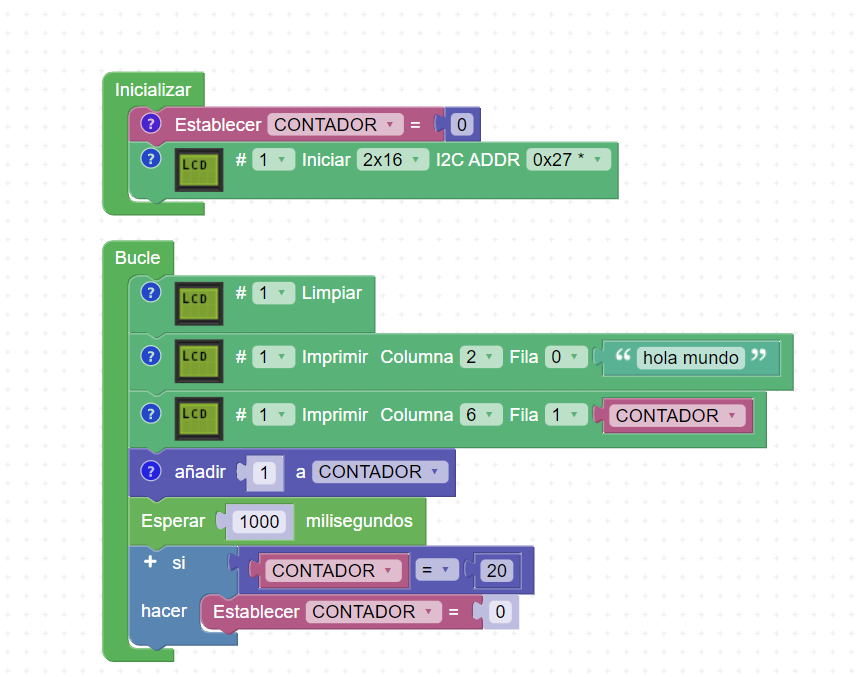
Descripción del sistema: Se pretende armar robot que detecte el nivel de turbidez del agua.
Consigna 1: El microcontrolador Arduino UNO deberá ser capaz de recibir la señal del sensor LDR e imprimir en la pantalla los niveles según una medición previa de los valores.
Actividades a desarrollar:
Se deberá realizar el armazón en el aula.
Representar el esquema eléctrico del sistema.
Realizar el diagrama en bloques del sistema.
Realizar las conexiones eléctricas en el aula.
Conexión de la pantalla LCD con controlador I2C.
Conexión de led y Ldr al arduino.
Si bien las conexiones están por separadas deben estar todas en el mismocontrolador y protoboards.
Realizar la programación y cargarla en el microcontrolador.
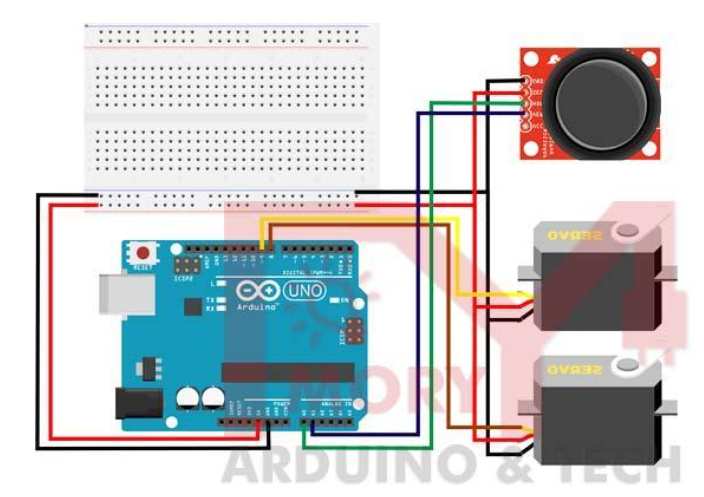
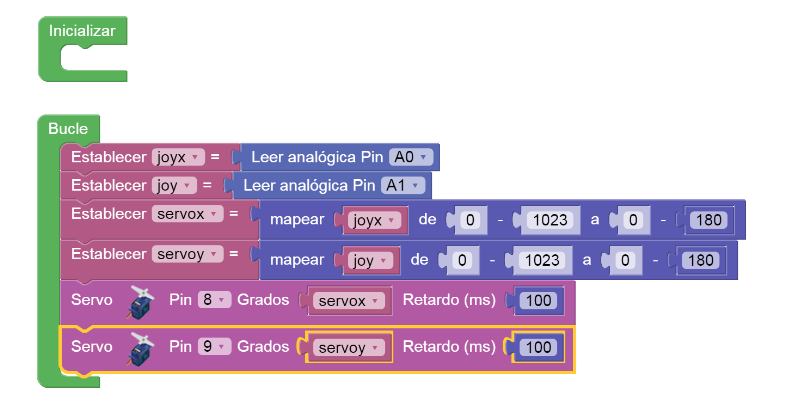
Objetivo: Implementar y reconocer los elementos de un sistema de control, los servomotores y el funcionamiento de un Joystick.
Elementos a utilizar:
Arduino Uno.
Cables.
2 servomotores.
1 Joystick.
1 sensor CNY70.
Descripción del sistema: Se pretende armar un brazo robótico de manera tal de desplazar un objeto de un lugar a otro.
Consigna 1: El microcontrolador Arduino UNO deberá ser capaz de las órdenes al joystick para que pueda mover los brazos desde lugar a otro.
Consigna 2: Al mover el objeto al lugar deseado deberá ver un sensor que detecte el objeto y que haga sonar un buzzer indicando que el mismo está en el lugar correcto.
Consigna 3: Contar tres objetos y que encienda y prenda un led indicando que la tarea a finalizado.
Actividades a desarrollar:
Se deberá realizar el brazo en el aula.
Representar el esquema eléctrico del sistema.
Realizar el diagrama en bloques del sistema.
Realizar las conexiones eléctricas en el aula.
Realizar la programación y cargarla en el microcontrolador.
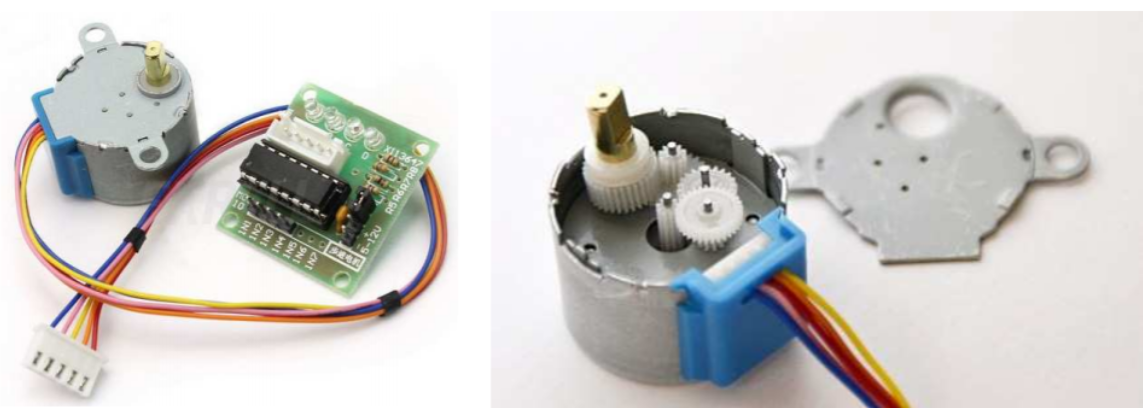
Mientras que los motores CC normales, están diseñados para que al alimentarlos giren de forma continua, un motor paso a paso está diseñado para girar un pasito cada vez que alimentas una de las fases
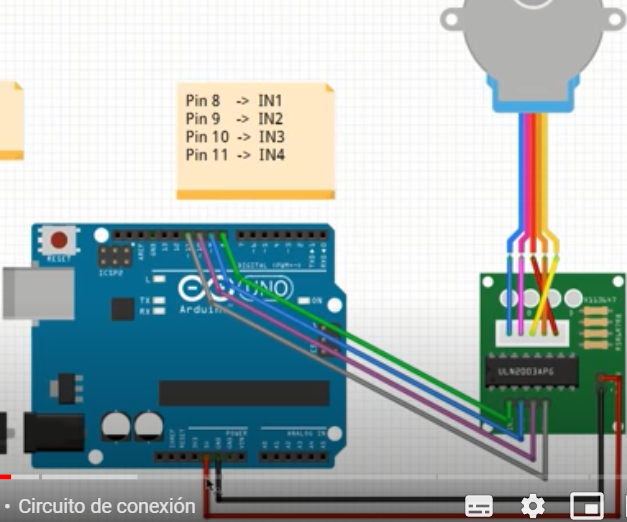
EN LOS KITS DE ARDUINO ENCONTRAMOS EL MOTOR 28BYJ-48 Y DRIVER ULN2003A
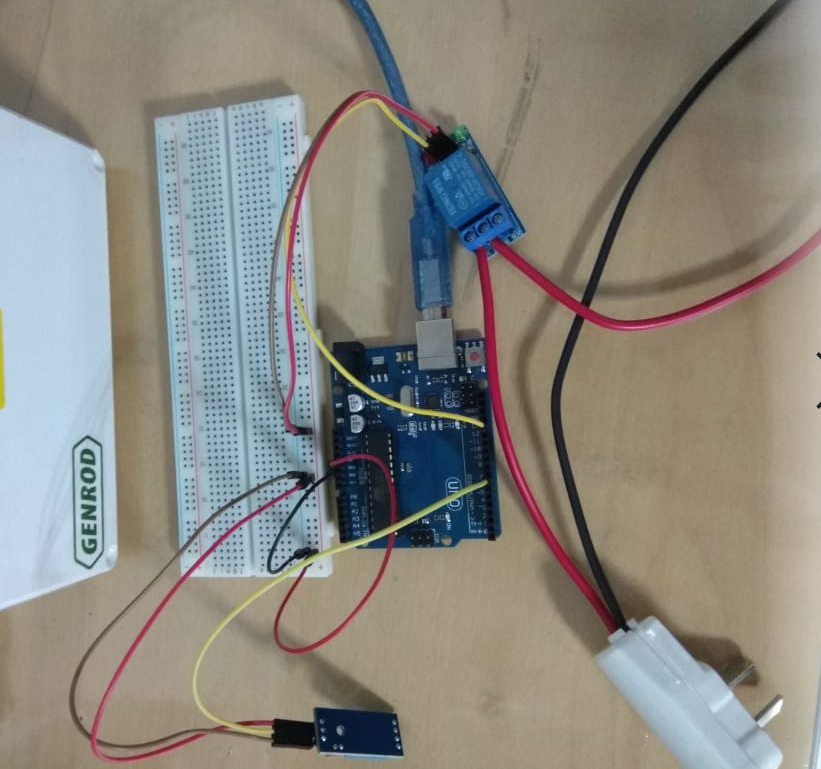
Aquí les dejo un ejemplo como se utilizan la mayoría de los componentes que fuimos viendo para hacer un auto robot
CIRCUITO DE CONEXIÓN
ARDUINO PIN
8
9
10
11
DRIVER
IN1
IN2
IN3
IN4
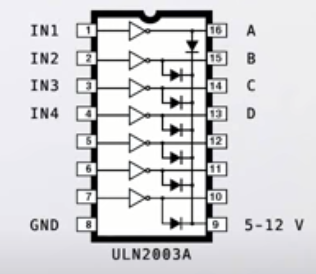
Controlador (Driver)
PRINCIPIO DE FUNCIONAMIENTO
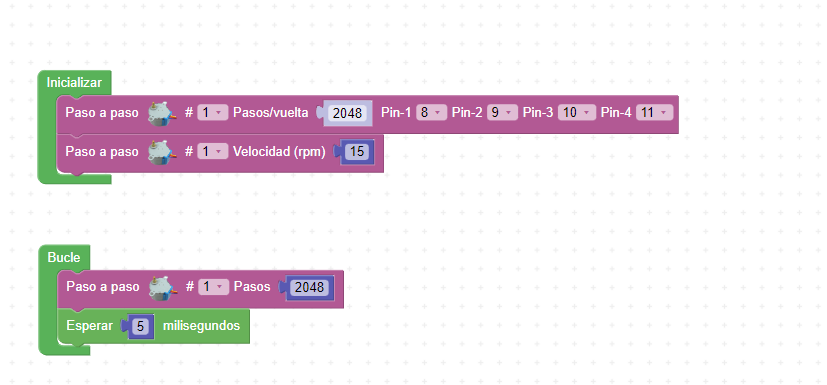
PROGRAMA IDE ARDUINO
int IN1 = 8; // pin digital 8 de Arduino a IN1 de modulo controlador int IN2 = 9; // pin digital 9 de Arduino a IN2 de modulo controlador int IN3 = 10; // pin digital 10 de Arduino a IN3 de modulo controlador int IN4 = 11; // pin digital 11 de Arduino a IN4 de modulo controlador int demora = 20; // demora entre pasos, no debe ser menor a 10 ms. // paso completo simple int paso [4][4] = // matriz (array bidimensional) con la secuencia de pasos { {1, 0, 0, 0}, {0, 1, 0, 0}, {0, 0, 1, 0}, {0, 0, 0, 1} };
void setup() { pinMode(IN1, OUTPUT); // todos los pines como salida pinMode(IN2, OUTPUT); pinMode(IN3, OUTPUT); pinMode(IN4, OUTPUT); }
void loop() {
for (int i = 0; i < 512; i++) // 512*4 = 2048 pasos { for (int i = 0; i < 4; i++) // bucle recorre la matriz de a una fila por vez { // para obtener los valores logicos a aplicar digitalWrite(IN1, paso[i][0]); // a IN1, IN2, IN3 e IN4 digitalWrite(IN2, paso[i][1]); digitalWrite(IN3, paso[i][2]); digitalWrite(IN4, paso[i][3]); delay(demora); } }










 " />
" />